Overview
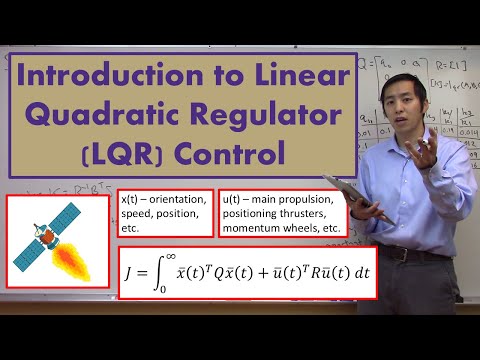
The Linear Quadratic Regulator (LQR) is a widely used control theory framework for determining the optimal control law for a linear system with a quadratic cost function. Developed in the 1960s by mathematicians such as Rudolf Kalman and David Mayne, LQR has been extensively applied in various fields, including robotics, aerospace, and process control. The LQR problem involves finding a state-feedback control law that minimizes a quadratic cost function, subject to a set of linear dynamics. With a vibe score of 8, LQR has had a significant impact on the development of modern control theory, with notable applications including the Apollo missions and autonomous vehicles. However, LQR has also been criticized for its limitations, such as its assumption of linear system dynamics and its sensitivity to model uncertainty. As control systems continue to evolve, the LQR framework remains a fundamental tool for control engineers, with ongoing research focused on extending its applicability to nonlinear systems and uncertain environments. The influence of LQR can be seen in the work of researchers such as Karl Johan Åström, who has made significant contributions to the development of LQR theory and its applications.
Key Facts
- Year
- 1960
- Origin
- Rudolf Kalman and David Mayne
- Category
- Control Systems
- Type
- Mathematical Concept