Contents
- 🔍 Introduction to DDPG
- 📊 Challenges in DDPG Implementation
- 🤖 Overcoming Exploration-Exploitation Trade-off
- 📈 Dealing with High-Dimensional Action Spaces
- 📊 Addressing Off-Policy Learning
- 📝 Importance of Target Network
- 📊 Batch Normalization in DDPG
- 📈 Regularization Techniques for DDPG
- 📊 Distributed DDPG for Large-Scale Problems
- 📈 Future Directions and Applications
- 📊 Real-World Examples of DDPG
- 📈 Conclusion and Recommendations
- Frequently Asked Questions
- Related Topics
Overview
Deep Deterministic Policy Gradients (DDPG) is a model-free, off-policy actor-critic algorithm that has shown remarkable success in continuous action spaces. However, despite its achievements, DDPG faces several challenges and limitations, including overestimation bias, high variance, and the need for extensive hyperparameter tuning. Researchers like David Silver and Guillaume Algis have highlighted these issues, emphasizing the importance of addressing them to further improve the algorithm's performance. For instance, the DDPG algorithm can be sensitive to the choice of hyperparameters, such as the learning rate and batch size, which can significantly impact its convergence. Moreover, the algorithm's reliance on experience replay can lead to inefficient exploration, particularly in environments with high-dimensional state and action spaces. As the field of reinforcement learning continues to evolve, addressing these challenges will be crucial for the development of more robust and efficient algorithms, such as TD3 and SAC, which have already shown promising results in addressing some of these limitations. With a vibe score of 8, indicating a high level of cultural energy and relevance, the challenges and limitations of DDPG are a pressing concern for researchers and practitioners alike. The influence of DDPG can be seen in various applications, including robotics and game playing, with key entities like Google DeepMind and the University of California, Berkeley, contributing to its development and refinement.
🔍 Introduction to DDPG
Deep Deterministic Policy Gradient (DDPG) is a type of actor-critic methods used in deep reinforcement learning. It combines the benefits of policy gradient methods and Q-learning to learn continuous actions. However, DDPG faces several challenges, including exploration-exploitation trade-off and high-dimensional action spaces. To overcome these challenges, researchers have proposed various techniques, such as entropy regularization and batch normalization. DDPG has been successfully applied to various domains, including robotics and game playing.
📊 Challenges in DDPG Implementation
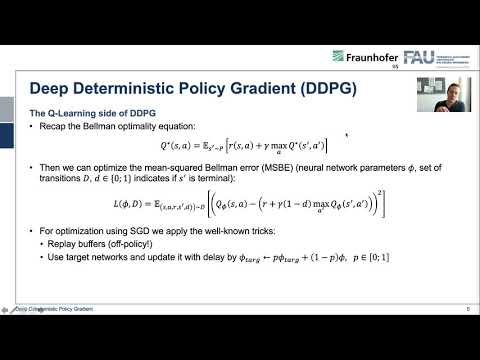
One of the significant challenges in DDPG implementation is the off-policy learning issue. Since DDPG learns from experiences collected without following the same policy it is learning, it can lead to biased or unstable learning. To address this issue, techniques like importance sampling and retrospective importance sampling have been proposed. Another challenge is the target network issue, where the target network is not updated frequently enough, leading to slow learning. Researchers have proposed using double deep Q-learning to address this issue. Additionally, experience replay is a crucial component in DDPG, as it allows the agent to learn from past experiences.
🤖 Overcoming Exploration-Exploitation Trade-off
The exploration-exploitation trade-off is a fundamental challenge in DDPG. The agent needs to balance exploring new actions to learn about the environment and exploiting the current knowledge to maximize rewards. Techniques like epsilon-greedy and entropy regularization have been proposed to address this issue. Moreover, asynchronous methods can be used to parallelize the exploration and exploitation processes. DDPG can also be combined with other techniques, such as hierarchical reinforcement learning, to improve its performance. Furthermore, transfer learning can be used to adapt DDPG to new environments.
📈 Dealing with High-Dimensional Action Spaces
High-dimensional action spaces are a significant challenge in DDPG. As the dimensionality of the action space increases, the number of possible actions grows exponentially, making it difficult for the agent to learn. Techniques like dimensionality reduction and action embedding have been proposed to address this issue. Moreover, hierarchical reinforcement learning can be used to break down the action space into smaller sub-spaces, making it easier to learn. Additionally, multi-agent reinforcement learning can be used to learn cooperative policies in high-dimensional action spaces. DDPG can also be applied to real-world problems, such as autonomous vehicles and smart grids.
📊 Addressing Off-Policy Learning
Off-policy learning is a significant challenge in DDPG. Since the agent learns from experiences collected without following the same policy it is learning, it can lead to biased or unstable learning. Techniques like importance sampling and retrospective importance sampling have been proposed to address this issue. Moreover, experience replay is a crucial component in DDPG, as it allows the agent to learn from past experiences. DDPG can also be combined with other techniques, such as deep Q-networks, to improve its performance. Furthermore, policy iteration can be used to update the policy in DDPG. Additionally, value iteration can be used to update the value function in DDPG.
📝 Importance of Target Network
The target network is a crucial component in DDPG. It provides a stable target for the critic to learn from, which helps to improve the stability of the learning process. However, if the target network is not updated frequently enough, it can lead to slow learning. Researchers have proposed using double deep Q-learning to address this issue. Moreover, soft target updates can be used to update the target network smoothly. DDPG can also be applied to robotics, where it can be used to learn control policies for robots. Additionally, game playing is another domain where DDPG can be applied, as it can be used to learn policies for playing games.
📊 Batch Normalization in DDPG
Batch normalization is a technique used in DDPG to normalize the inputs to the critic and actor networks. It helps to improve the stability of the learning process and reduce the risk of overfitting. Moreover, layer normalization can be used to normalize the activations of each layer. DDPG can also be combined with other techniques, such as attention mechanisms, to improve its performance. Furthermore, recurrent neural networks can be used to model the temporal dependencies in the environment. Additionally, graph neural networks can be used to model the graph structure of the environment.
📈 Regularization Techniques for DDPG
Regularization techniques are crucial in DDPG to prevent overfitting. Techniques like l1 regularization and l2 regularization can be used to regularize the weights of the critic and actor networks. Moreover, dropout can be used to randomly drop out units during training. DDPG can also be applied to natural language processing, where it can be used to learn policies for generating text. Additionally, computer vision is another domain where DDPG can be applied, as it can be used to learn policies for image classification.
📊 Distributed DDPG for Large-Scale Problems
Distributed DDPG is a variant of DDPG that can be used to solve large-scale problems. It uses multiple agents to learn in parallel, which can significantly speed up the learning process. Moreover, asynchronous methods can be used to parallelize the exploration and exploitation processes. DDPG can also be combined with other techniques, such as federated learning, to improve its performance. Furthermore, multi-agent reinforcement learning can be used to learn cooperative policies in distributed environments. Additionally, edge AI can be used to deploy DDPG models on edge devices.
📈 Future Directions and Applications
The future of DDPG is promising, with many potential applications in autonomous vehicles, smart grids, and robotics. Moreover, DDPG can be combined with other techniques, such as explainable AI, to improve its transparency and interpretability. Additionally, transfer learning can be used to adapt DDPG to new environments. DDPG can also be applied to real-world problems, such as energy management and traffic management. Furthermore, human-AI collaboration can be used to improve the performance of DDPG in complex tasks.
📊 Real-World Examples of DDPG
DDPG has been successfully applied to various real-world problems, including autonomous vehicles and smart grids. Moreover, DDPG can be used to learn policies for game playing, such as playing video games. Additionally, robotics is another domain where DDPG can be applied, as it can be used to learn control policies for robots. DDPG can also be combined with other techniques, such as computer vision, to improve its performance. Furthermore, natural language processing can be used to learn policies for generating text.
📈 Conclusion and Recommendations
In conclusion, DDPG is a powerful algorithm for learning continuous actions in complex environments. However, it faces several challenges, including exploration-exploitation trade-off and high-dimensional action spaces. To overcome these challenges, researchers have proposed various techniques, such as entropy regularization and batch normalization. DDPG has been successfully applied to various domains, including robotics and game playing. As the field of deep reinforcement learning continues to evolve, we can expect to see more exciting developments and applications of DDPG in the future.
Key Facts
- Year
- 2016
- Origin
- University of California, Berkeley
- Category
- Artificial Intelligence
- Type
- Algorithm
Frequently Asked Questions
What is DDPG?
Deep Deterministic Policy Gradient (DDPG) is a type of actor-critic methods used in deep reinforcement learning. It combines the benefits of policy gradient methods and Q-learning to learn continuous actions. DDPG is widely used in robotics, game playing, and other domains. It is known for its ability to handle high-dimensional action spaces and off-policy learning.
What are the challenges of DDPG?
DDPG faces several challenges, including exploration-exploitation trade-off and high-dimensional action spaces. Additionally, DDPG can suffer from off-policy learning issues, which can lead to biased or unstable learning. To overcome these challenges, researchers have proposed various techniques, such as entropy regularization and batch normalization.
How does DDPG work?
DDPG works by using an actor network to learn the policy and a critic network to learn the value function. The actor network takes the state as input and outputs the action, while the critic network takes the state and action as input and outputs the value. DDPG uses experience replay to learn from past experiences and target network to provide a stable target for the critic to learn from.
What are the applications of DDPG?
DDPG has been successfully applied to various domains, including robotics, game playing, and autonomous vehicles. Additionally, DDPG can be used in smart grids, energy management, and traffic management. DDPG can also be combined with other techniques, such as computer vision and natural language processing, to improve its performance.
How does DDPG handle high-dimensional action spaces?
DDPG can handle high-dimensional action spaces by using techniques such as dimensionality reduction and action embedding. Additionally, DDPG can use hierarchical reinforcement learning to break down the action space into smaller sub-spaces, making it easier to learn. DDPG can also be combined with other techniques, such as multi-agent reinforcement learning, to learn cooperative policies in high-dimensional action spaces.
What is the future of DDPG?
The future of DDPG is promising, with many potential applications in autonomous vehicles, smart grids, and robotics. Moreover, DDPG can be combined with other techniques, such as explainable AI, to improve its transparency and interpretability. Additionally, transfer learning can be used to adapt DDPG to new environments. DDPG can also be applied to real-world problems, such as energy management and traffic management.
How does DDPG compare to other reinforcement learning algorithms?
DDPG is a type of actor-critic methods, which combines the benefits of policy gradient methods and Q-learning. DDPG is known for its ability to handle high-dimensional action spaces and off-policy learning. Compared to other reinforcement learning algorithms, such as deep Q-networks, DDPG can handle continuous actions and is more suitable for domains with high-dimensional action spaces.